編碼器簡介
譯碼器、編碼器(ROTARY ENCODER為將機械軸或馬達軸之轉動量,換成電器訊號的一種感測器。編碼器可按以下方式來分類。
1、按碼盤的刻孔方式不同分類
(1)增量型:就是每轉過單位的角度就發出一個脈衝信號(也有發正餘弦信號,然後對其進行細分,斬波出頻率更高的脈衝),通常為A相、B相、Z相輸出,A相、B相為相互延遲1/4周期的脈衝輸出,根據延遲關係可以區別正反轉,而且通過取A相、B相的上升和下降沿可以進行2或4倍頻;Z相為單圈脈衝,即每圈發出一個脈衝。
(2)絕對值型:就是對應一圈,每個基準的角度發出一個唯一與該角度對應二進制的數值,如 BCD 碼、GREY 碼。(需能解 BCD CODE、GREY CODE 之計數器或電腦,用此機型成本雖較高,但斷電後被轉動卻不怕亂了位址)。
2、按信號的輸出類型分為:電壓輸出、集電極開路輸出、推拉互補輸出和長線驅動輸出。
3、以編碼器機械安裝形式分類
(1)出心型(有軸型):出心型又可分為夾緊法蘭型、同步法蘭型和伺服安裝型等。
(2)中空型(軸套型):中空型又可分為半空型、貫穿型和大口徑型等。
4、以編碼器工作原理可分為:光電式、磁電式和觸點電刷式。
如何選用編碼器
1. 首先應注意譯碼器軸心所能承受之負荷,來決定encoder之大小。
2. 再看安裝空間的大小、位置,再決定用出心型或中空型,直接或間接耦合。
3. 視實際需求之精度,推算螺桿節距之大小或輥輪直徑,以求出解析度P/R。
4. 計算機械轉數,選擇響應頻率。F = RPM/60 x P/R。
5. 從搭配使用之計數器、PLC 或電腦,決定 encoder 之電壓。
6. 考慮成本。
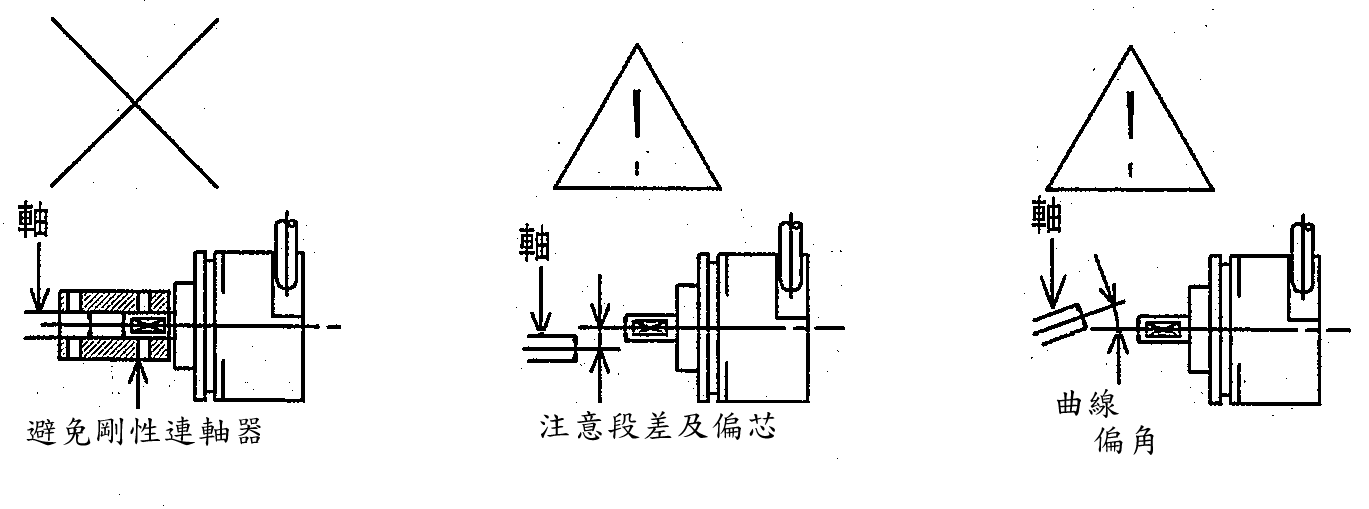
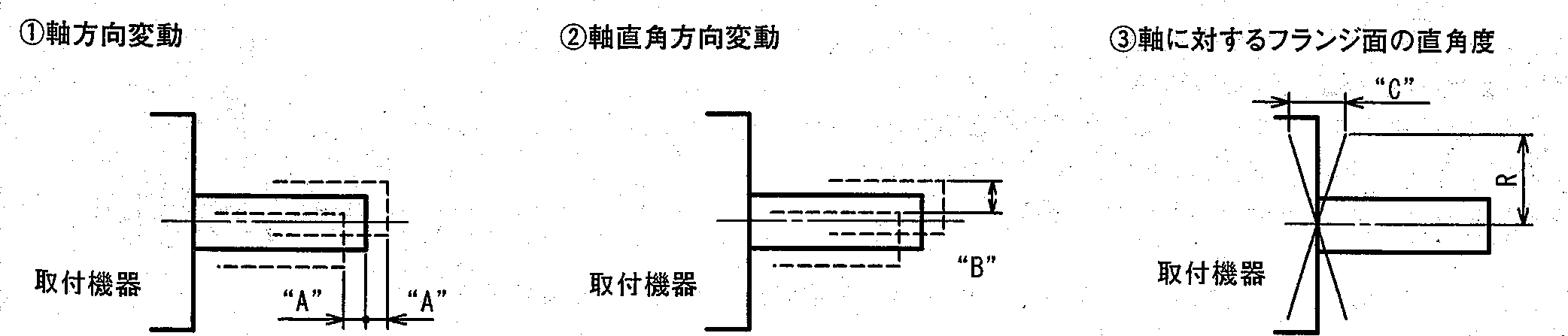
編碼器安裝時應注意什麼?
1. 機械軸與譯碼器軸之中心線務必對正。
2. 沒有十足把握時,請加裝連軸器,可允許微量角度偏差。縱然偏差過大,也是連軸器毀損,不會傷及 encoder。
3. 如係中空型 encoder,其重量均已由機械軸心承受,故僅需一彈片固定,使 encoder 本體不致跟著轉動即可。
4. 連軸器裝好後,請先輕輕轉動,可用原子筆尾端頂住連軸器支圓週,看原子筆是否隨之轉動?如有,則表示偏心請再調整。
5. 安裝 encoder 時切忌使用敲打方式